Расширенная настройка передатчика
28.03.2019
Когда мы развиваемся в хобби, ввод правильных параметров модели в нашем передатчике начинаем делать чуть ли не подсознательно. И чем больше мы пользуемся той или иной функцией (или набором функций), тем чаще и быстрее мы выставляем требуемые параметры, чтобы получить поведение модели, которое нас устраивает. Если взглянуть на каждую функцию отдельно, то достаточно легко понять, что она делает, и как правильно её использовать. Однако, когда функции начинают объединяться, взаимодействовать друг с другом, накладываться друг на друга разными способами, это просто взрывает мозг и становиться тяжело разобраться, что в конце концов происходит.
Иногда мы не можем с первого раза понять, почему модель ведёт себя странно. Именно по этой причине была написана данная статья, в которой я собираюсь рассмотреть несколько особенностей программирования таких функций передатчика, как «Sub-Trim», «Travel Adjust» и другие. Да, вы всё правильно поняли. Для того, чтобы идти дальше, нужно в начале понять основы, разобрать и продемонстрировать на примерах схему взаимодействия и как она влияет на производительность. Я начну с краткого обзора, состоящего из описания функции, того, что она делает, для чего предназначена и как реализована. Так же я приведу конкретные примеры, когда и как именно некоторые функции могут взаимодействовать друг с другом.
Немного теории
Когда вы работаете с передатчиком, вы взаимодействуете с различными элементами управления (стики, переключатели, регуляторы и т.д.). Положения этих элементов управления затем обрабатываются, на них накладываются различные алгоритмы, реализующие наборы функций. После того, как вся обработка завершена, эти данные передаются по радиоканалу приёмнику. Приёмник получает эти данные и выдаёт их в цифровом виде на устройства управления (например, в фбл системах, или сервоприводах, подключаемых с помощью последовательных шин, как у Futaba) или, что гораздо чаще, преобразует их в импульсы напряжения различной длины, которые выводятся на порт соответствующего канала. Аналоговые или цифровые сервоприводы, или другие приёмники принимают команды на основе ширины импульсов, полученных от приёмника.
Стандартные сервоприводы используют ширину импульса в районе 1500мс в качестве обозначения центрального положения. Увеличение или уменьшение ширины импульса приводит к изменению положения качалки сервопривода по часовой или против часовой стрелки.
Конструктивные ограничения системы
Теперь зная, как именно сервопривод понимает, как и куда двигаться, мы осознаем, что качество управления будет зависеть от того, на сколько точно передатчик и приёмник сформируют управляющие импульсы. Именно эта точность зависит от такого параметра, как разрешение. Разрешение показывает, с какой точностью передатчик способен отследить изменения положений управляющих элементов и передать эти значения, а приёмник сможет сформировать управляющие импульсы для получателей. Разрешения, которые используются в современных системах, выражаются параметром число шагов, 1024 шага или 2048 шагов. Если применить эти значения на широко распространённый диапазон ШИМ модуляции от 900мс до 2100мс, мы получим, что система, использующее разрешение 1024 сможет формировать импульсы ШИМ с шагом 1,2мс, а система, использующая разрешение 2048, сможет формировать импульсы ШИМ с шагом 0,6мс. Таким образом, система с разрешением в 2048 сможет формировать импульсы более точно, по сравнению с системой 1024.
Это график того, что сервопривод видит на входе своего канала управления, импульсы, ширина которых и говорит сервоприводу, в какую сторону и на сколько сильно отклоняться.
Необходимо учесть важный момент. Общий диапазон возможной ширины импульса (абсолютный максимум ширины и абсолютный минимум ширины) в сумме с разрешением, говорит нам максимальное разрешение, которое может иметь канал управления. Как я покажу ниже, при использовании даже основных функций настройки и обработки, почти всегда происходит уменьшение разрешения, а иногда вообще может привести к артефактам в управлении.

Это моя тестовая конфигурация. Ничего не подключалось к приёмнику, только прибор для замера длины импульса на один из входов.
Сущность функций обработки
Теперь давайте взглянем на четыре основных параметра настроек:
- Travel Adjust (or End Point Adjust)
- Sub-Trim
- Dual-Rate
- Exponential
Для демонстрации примеров воздействия данных параметров я буду регулировать их на одном канале, управляемом стиком передатчика и демонстрировать полученный сигнал с соответствующего канала приёмника. Что бы результаты были как можно более точными, я отключу в передатчике все компенсации и программируемые миксы. В качестве демонстрационного стенда я буду использовать мой передатчик Spektrum DX18 и приёмник Spektrum AR8000. Данная система работает с разрешением 2048. Ширина результирующих импульсов будет измеряться на выходе канала приёмника.
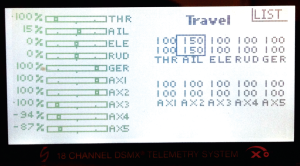
Travel Adjust (or End Point Adjust)
Как видно из названия, данный параметр используется для регулировки диапазона движения сервопривода. То есть мы регулируем, на сколько должен отклониться сервопривод при максимальном отклонении стика передатчика. Параметр указывается в процентах. В системе Spektrum диапазон может быть настроен от 0 до 150% в каждом направлении. Теперь обратите внимание на следующее. Разрешение 2048 говорит нам о том, что 2048 шагов равномерно распределены по всему диапазону от -150 до +150. Что это значит? В сущности, это означает, что вы должны выставить параметр Travel Adjust +150 в верхнем положении и -150 в нижнем, чтобы получить полное разрешение системы в 2048 шагов. При настройке в 150 для максимума и минимума, я измерил ширину импульсов, выдаваемых приёмником конечному устройству, и у меня получились значения 930мс и 2070мс. Это минимальное и максимальное значение, которое можно получить на канале управления для данного оборудования. Зная, что максимальный диапазон составляет 2070-930=1140мс, мы можем понять, что система генерирует ширину импульса управления с шагом приблизительно 0,56мс. Если же отрегулировать Travel Adjust и выставить значения +/-100, минимальная ширина импульса составит 1120мс, максимальная ширина импульса составит 1880мс. Если разделить полученный диапазон (1880-1120=760) на 0,56мс (шаг системы при разрешении 2048), мы получим 1357 шагов. Мы видим, что диапазон уменьшился на 33 процента.
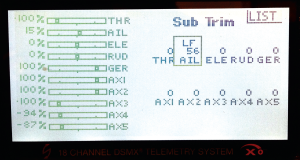
Sub-Trim
Данный параметр обычно используется для настройки центрального положения сервопривода. Реализуется это достаточно просто. Система сдвигает выходной сигнал на дельту, заданную в данном параметре в ту сторону, в которую мы задали. Вспомнив, о чём говорилось в предыдущем разделе о Travel Adjust, мы поймём, что на 100 процентах Travel Adjust мы получаем диапазон изменения ширины импульса в 760мс (1880мс-1120мс). В системе DX18 шаг выставив в параметре Sub-Trim значение 50, мы снова провели измерения. Нейтральная позиция переместилась от 1500мс до 1560мс, а максимальное и минимальное значение длины импульса стали 1180мс и 1940мс соответственно. Обратите внимание на тот факт, что общий диапазон остался таким же, но при этом конечные точки сместились.
Важно помнить, что применение Sub-Trim не увеличит максимальный диапазон, который способна выдать аппаратура. То есть если мы поставим в Travel Adjust значение +150, а в Sub-Trim выставим +50, после чего замерим значения длины импульса на выходе приёмника, мы получим в нейтральном положении 1560мс, как и ожидали. Минимальное значение так же станет 990мс (930+60). А вот максимальное значение не будет 2130мс, а останется 2070мс, то есть окажется обрезанным, потому что длиннее аппаратура не способна выдать.
Dual-Rate
Я лично считаю термин «Dual-Rate» или в русском сленге моделистов «Двойные расходы», ошибочным. Это особенно заметно, если обратить внимание на то, что современные передатчики позволяют настраивать тройные расходы и больше. Функция первоначально была разработана для снижения расходов, хотя общие расходы (диапазон движения) могут быть уменьшены с помощью сокращения Travel Adjust на какой-либо процент. Так как функция развивалась со временем, она позволяет так же увеличивать расходы.
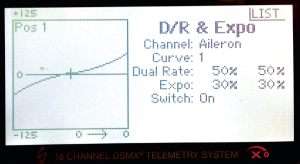
Ещё раз вспомним, что 100 процентов Travel Adjust с нулевыми Sub-Trim дали нам минимальную и максимальную длину импульса равную 1120мс и 1880мс. Я добавил 50 пунктов в параметре Dual-Rate и провёл повторные замеры. Результат был 1310мс и 1690мс. Диапазон работы сократился, при этом уменьшилось разрешение канала (как мы помним, шаг всегда одинаков). В результате мы получили 679 шагов на весь ход стика. И наоборот, если вы увеличите расходы, вы повысите разрешение. Просто помните, что при использовании функции Dual-Rate для увеличения расходов, вы можете уткнуться в максимальные значения, генерируемые аппаратурой, как это было с Sub-Trim.
Exponential
Экспоненты существуют для того, чтобы уменьшить или увеличить чёткость управления в районе центральной позиции канала (в среднем положении стиков). Они не меняют общий диапазон перемещения сервоприводов и как следствие, не вносят никаких дополнительных эффектов. При этом экспоненты изменяют линейность между положением стика и положением сервопривода, поэтому они вносят в управление новую особенность, которую я называю переменное разрешение.
Когда экспонента используется в контуре управления, мы видим, что разрешение передатчика уменьшается, когда мы приближаемся к центральной позиции стика. Это означает, что в чем ближе к середине, тем меньше отклоняются сервы при отклонении на одинаковый градус. Грубо говоря, разрешение увеличивается в геометрической прогрессии, при движении стика от центра.
Заключение
Каждый из параметров, описанных выше, приводит к изменению способа формирования импульсов управления и последующего положения сервопривода. Порядок, в котором данные функции накладываются на канал, каким образом они будут накладываться, зависит от разработчика аппаратуры. Именно по этой причине вы не должны ждать от аппаратуры другого производителя (или даже от разной аппаратуры одного производителя) такие же цифры, что я привёл в примере. Но, понимая как это работает, как эти параметры взаимодействуют, вы лучше понимаете, как наиболее оптимально их использовать, что в конечном счёте позволяет вам избежать ошибок, иногда очень дорогих в нашем хобби :)
Автор Chuck Bassani
Перевод Антон Баташов














