Учимся управлять коптером
11.12.2015
Как управлять квадрокоптером. Подробная инструкция.
Режимы полета и интеллектуальное управление ориентацией.
Сегодня мультикоптеры являются прекрасной площадкой для аэрофотосъемки и видео. Они очень стабильны, а от того легки в управлении и имеют очень мало движущихся частей. Поэтому они не сильно вибрируют и могут зависать в одном точном месте настолько долго, насколько это необходимо. Существуют разные режимы полета, которые облегчают контроль летательного аппарата для пилота. Когда вы поймете, как и когда использовать, хороший полет и удачные кадры вам обеспечены. Давайте внимательнее рассмотрим режимы полета, когда и как их использовать.
Режимы полета.
Многие новые квадрокоптеры имеют, по крайней мере, три различных режима полета: удержания полета с использованием функции GPS, удержания полета, и ручной. Каждый из этих режимов будет более или менее оказывать влияние на стабильность модели во время полета. Когда использовать тот или иной режим, будет зависеть от летных навыков пилота и обстоятельств.
Ручной режим полета
(Manual Mode)
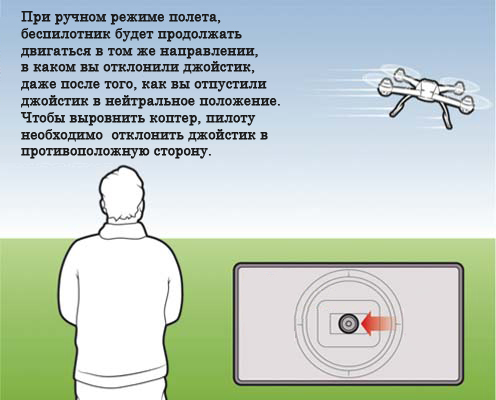
При Manual Mode полета мультикоптер имеет наименьшую стабильность. Управлять дроном при таких характеристиках непросто. Здесь требуются навыки и большая внимательность от пилота - контролировать беспилотник придется в любой точке его нахождения, где бы он не был. Использование ручного режима полета позволит вам делать фигуры высшего пилотажа, потому что при нем не будет никаких ограничений угла наклонов по крену и тангажу, а также отсутствует вертикальная фиксация скорости. Это значит, вы можете крутить ваш квадрокоптер под любым углом. (Рис.1)
При положении Manual Mode вы не можете убирать пальцы от джойстиков, потому что требуется много поправок во время полета. Здесь нет никакой помощи от системы стабилизации. Опять же, это идеальный режим для фигур высшего пилотажа, и для таких полетов, которые требуют точного контроля и управления от пилота, например, полет с препятствием или при выполнении петли. Недостатком такого поведения коптера является то, что он не способен самостоятельно выравниваться, когда вы отпускаете стики. Любой угол, который принимает дрон, выравнивается соответствующим движением джойстика в противоположную сторону. (Рис.2)

(Рис.1)
(Рис.2)
Режим удержания угла полета
(Attitude Holding Mode)
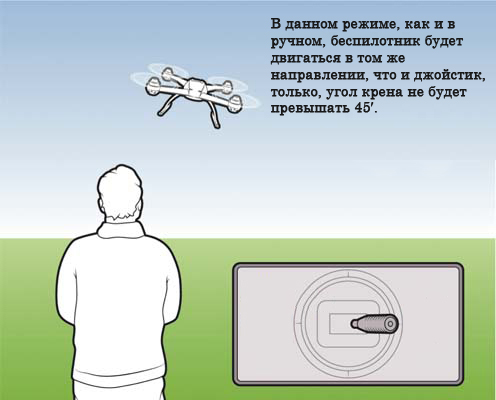
Этот режим позволяет пилоту использовать стабилизацию гироскопа, чтобы сохранить направление движения квадрокоптера. Это означает, что когда вы отпустите джойстик в нейтральное положение, мультикоптер сам попытается выровниться. Однако, как только дрон выровняется, он продолжит двигаться в том же направлении, в котором он летел до ослабления стиков. (Рис.3) Для того чтобы остановить эту динамику, пилоту придется добавить корректирующие движения стаками, чтобы посадить мультироторную машину или остановить его в воздухе. (Рис.4) Что бы удержать коптер в подвешенном состоянии в одном положении, пилоту придется добавить корректирующие движения джойстиками.
В этом режиме многие системы не позволяют накреняться более чем на 45-градусный угол. На ветру такие модели квадрокоптеров имеют тенденцию двигаться в направлении ветера. Чтобы сохранить коптер недвижимым в определенный точке в небе, пилоту придется принять корректирующие меры. Положительной чертой этого режима является то, что если вы немного дезориентированы, вы можете освободить стики, и мультикоптер вернется к ровному полету. Управлять в таком режиме намного легче, чем в предыдущем.
Это идеальный режим для съемки видео, потому что квадрокоптер с камерой может следовать за снимаемым объектом, и если вы отпустите джойстики, он выровняется, и продолжит дрейфовать в заданном направлении. Съемка в данном режиме будет плавной, без каких-либо резких движений. Attitude Holding Mode идеально подходит для профессионального видеооператора и для лиц, имеющих небольшой опыт полета на квадрокоптерах.
(Рис.3)

(Рис.4)
Режим удержания угла полета с использованием функции GPS
(GPS Attitude Flying Hold Mode)
В этом режиме, беспилотник находится в постоянной связи со спутниками GPS. Это позволяет пилоту стабилизировать его в трехмерном пространстве, сохраняя высоту и положение. Если вы столкнулись с какими-нибудь проблемами, в этом режиме достаточно просто отпустить джойстики и мультикоптер вернется в стационарное положение, и будет находиться в нем до тех пор, пока вы не зададите ему новое направление. Согласитесь, управялять квадрокоптером так намного легче.
GPS Attitude Flying Hold Mode также поможет беспилотнику пребывать в одном положении в ветреный день. В отличие от предыдущего, функция GPS остановит поступательное движение квадрокоптера, когда ослабляются ручки управления. (Рис.6) Здесь необходимости делать корректирующие движения джойстиком. Управление коптером с GPS Attitude идеально подходит для фотографа, который хочет расположить свой аппарат с камерой в определенном месте и сделать ряд фотографий. Зависнуть дрону на одном месте и удерживать выбранную позицию позволяет GPS система.
Надо иметь ввиду , что она работает только на открытом воздухе в условиях ясного неба. Этот режим также может быть использован для видео, так как GPS система исправит любые колебания и помехи, создаваемые ветром. Качество съемки будет также зависеть от того, как видеокамера крепится к беспилотнику. Управлять в этом режиме легко пилоту новичку, который не имеет большого опыта в обращении с квадрокоптерами. Если пилот теряет ориентацию (а это вполне возможно), достаточно ослабить стики, чтобы мультикоптер удерживал свое положение до тех пор, пока пилот не восстановит самообладание.

(Рис.5)

(Рис.6)
Интеллектуальное управление ориентацией.
Три вышеописанных режима в основном касаются стабильности квадрокоптера. Одной из прелестей передовых аппаратов является то, что у них есть новейшие достижения современных технологий. Это также позволяет нам контролировать ориентацию полета по отношению к пилоту. И еще одно преимущество – это наличие GPS технологии, связанной с нашей авиации. Давайте посмотрим на эти три различных варианта интеллектуального управления ориентацией.
Ручное управление полетом.
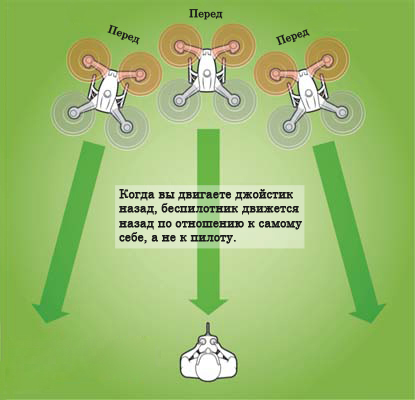
При полете с выключенной функцией интеллектуального управления ориентацией (переключатель находится в положении OFF), пилот управляет дроном, ориентируясь на то, куда обращен нос коптера. (Рис.7) При нажатии на джойстик вперед, нос уходит от пилота (при условии, что вы стоите за квадрокоптером и нос направлен в сторону от вас). Нажатием стика вправо, бемпилотник движется вправо, и, соответственно, нажав стика влево, мультикоптер станет двигаться влево. Это все понятно, до тех пор, пока нос мультиротора не будет смотреть на пилота. Тогда все движения квадрокоптер начнет делать в "зеркальном" виде, и это может дезориентировать пилота. (Рис.8) Т.е вы наклоняете коптер вправо, а он наклоняется от вас влево. По такиому принципу летают все радиоуправляемые модели самолетов и вертолетов. Этот режим в основном для опытных моделистов.
Если квадрокоптер находится на некотором расстоянии, то достаточно трудно, даже для опытного владельца, увидеть, куда обращен нос. Лучше всего воспользоваться двумя другими режимами интеллектуального управления ориентации. Кстати говоря, наличием этих двух нижеописанных функций могут похвастаться только мультироторные системы. Для самолетов они не доступны, а у вертолетов встречаются крайне редко и очень дорогостоящие.

(Рис.7)
(Рис.8)
Блокировка курса полета
(Course Lock)
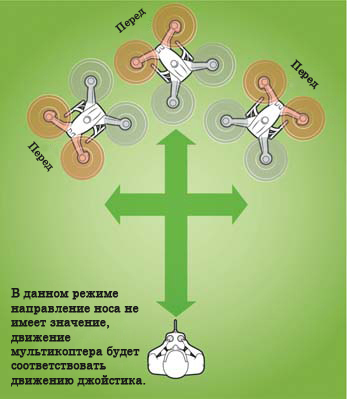
Первое интеллектуальное управление ориентацией называется режимом блокировки курса полета (Course Lock). При первом запуске квадрокоптера спутник GPS фиксирует его в начальной точке полета. Любое движение джойстика вперед, назад, вправо или влево будет зависеть от этой точки, независимо от ориентации носа мультикоптера. Это позволяет моделисту летать, когда нос мультиротера смотрит в любом направлении так же, как если нос был всегда направлен вперед. (рис.9) Когда ручка на передатчике двигается вправо, то коптер всегда будет двигаться вправо, независимо от того идет ли нос к точке старта или от нее.
Здесь важно помнить то, что летательный аппарат всегда будет двигаться по прямой линии. Например, если вы летите прямо 10 метров от начального положения, затем 10 метров вправо, затем 10 метров назад, то дрон все равно будет находиться в 10 метрах справа от отправной точки. Вам придется лететь 10 метров влево, чтобы вернуть его обратно к исходной точке. И не имеет значение, сколько раз вы вращали квадрокоптер вокруг горизонтальной оси во время этого полета.Эта функция хороша в том случае, если вам приходится двигаться во время полета; например, если вы случайно снимаете движущийся объект и должны двигаться, чтобы следовать за ним.
(Рис.9)
Блокировка начала полета
(Home Lock)
Второй вид интеллектуального управления ориентацией называется режимом блокировки начала полета или функцией Home Lock. Отправная точка вновь избирается спутником GPS при первом запуске мультиротера. Однако, каждый раз, когда стик двигается вперед, беспилотник улетает с точки старта, и когда джойстик отклоняется назад, то коптер будет лететь назад к этой точке. Опять же, это независимо от ориентации носа квадрокоптера. (Рис.10) В Home Lock, если вы пролетели 10 метров, затем повернули вправо, то он пролетит круг в 10 метров вокруг отправной точки. В данном случае, если вы летите 10 метров прямо от начального положения, затем 10 метров вправо, затем 10 метров назад, то мультикоптер вернется на точку старта. Этот режим идеально подходит в том случае, если вы всегда управляете дроном с одного места. Например, если бы вы стояли на причале и снимали серферов в океане, то именно этот режим вам необходимо использовать, потому что все, что вам нужно сделать, это потянуть джойстик назад и ваш мультиротер вернется к месту взлета.
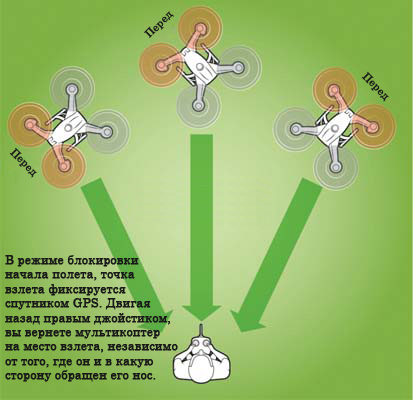
(Рис.10)
Заключение
Надеемся, что эти инструкции и нижеприведенное видео дадут вам лучшее преставление о том, как управлять квадрокоптером. В большинстве случаев, режимы полета располагаются на одном трехпозиционном переключателе, а интеллектуальный режим с ориентацией - на другом трехпозиционном переключателе. Воспользуясь новейшими технологиями, вы облегчите управление вашим дроном, и научитесь хорошо летать. И помните, многие маленькие квадрокоптеры, улетев даже на незначительное расстояние, могут сделаться небольшой точкой в небе и вы можете потерять контроль. Отсюда вывод - держите дрон в поле своей прямой видимости и будьте осторожны!
Статья подготовлена интернет-магазином RC-RUSSIA. При копировании материалов ссылка на источник обязательна.














